



-
中国科学院近代物理研究所在兰州重离子研究装置(HIRFL)上新建了一台CW直线加速器SSC-LINAC,作为分离扇回旋加速器(SSC)的注入器[1],提高了整个HIRFL系统的运行效率。SSC-LINAC由1个RFQ加速器[2]和4个DTL(Drift Tube Linac)组成[3]。SSC-LINAC RFQ谐振腔主要参数见表1[4]。
表 1 SSC-LINAC RFQ腔体主要参数
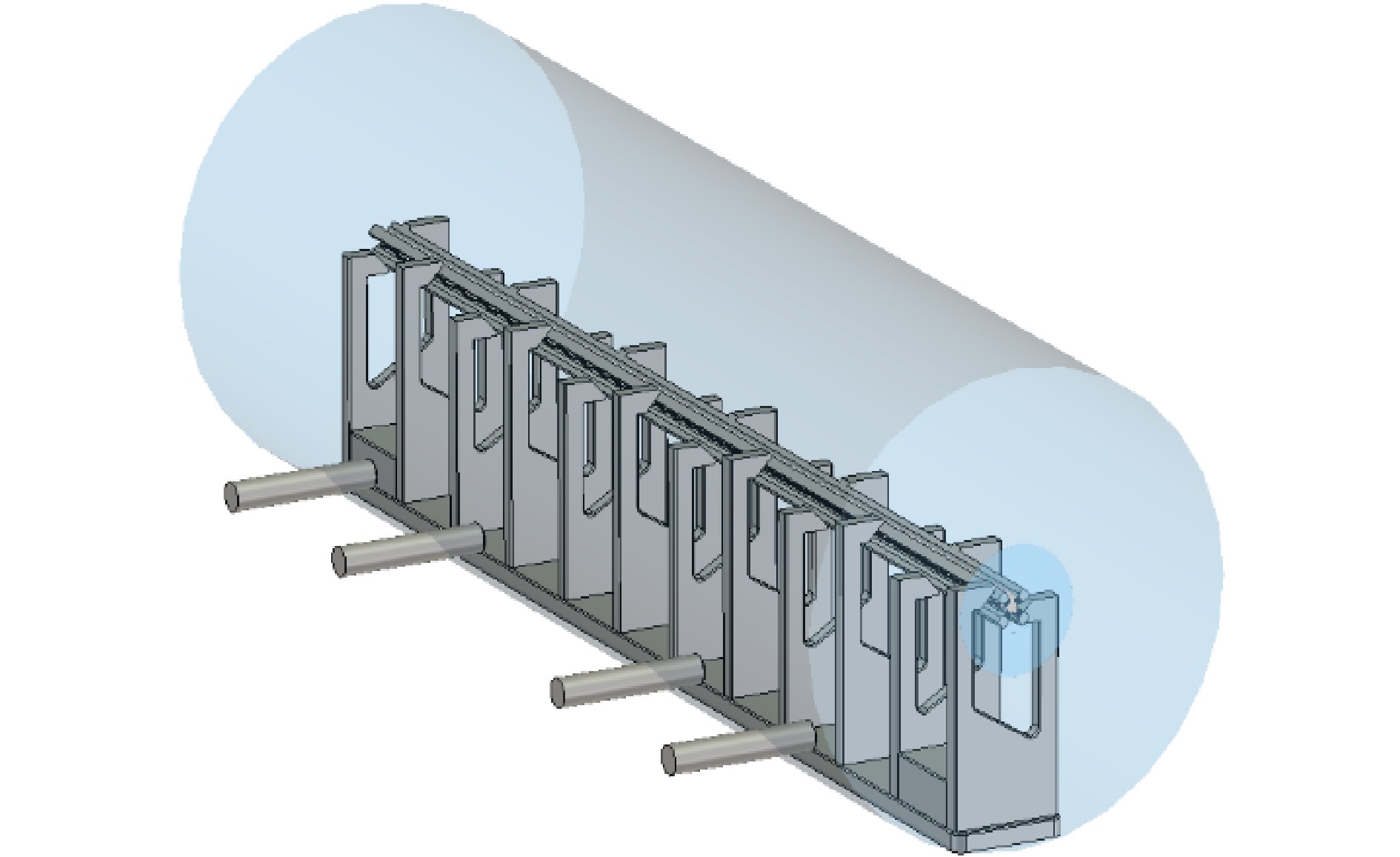
参数 数值 工作频率/MHz 53.667 设计粒子 238U34+ 输入能量/(keV/u) 3.728 输出能量/(keV/u) 143 腔体电压/kV 70 传输效率/% 94.1 结构长度/cm 250.846 功率消耗/kW 30 馈入功率会引起腔体温度升高,引发腔体受热形变,导致腔体谐振频率变化[5]。SSC-LINAC RFQ腔体调谐通过其侧面安装的四根直径为55 mm的调谐杆完成,如图1所示。调谐杆位置与腔体谐振频率改变量关系见图2[6]。
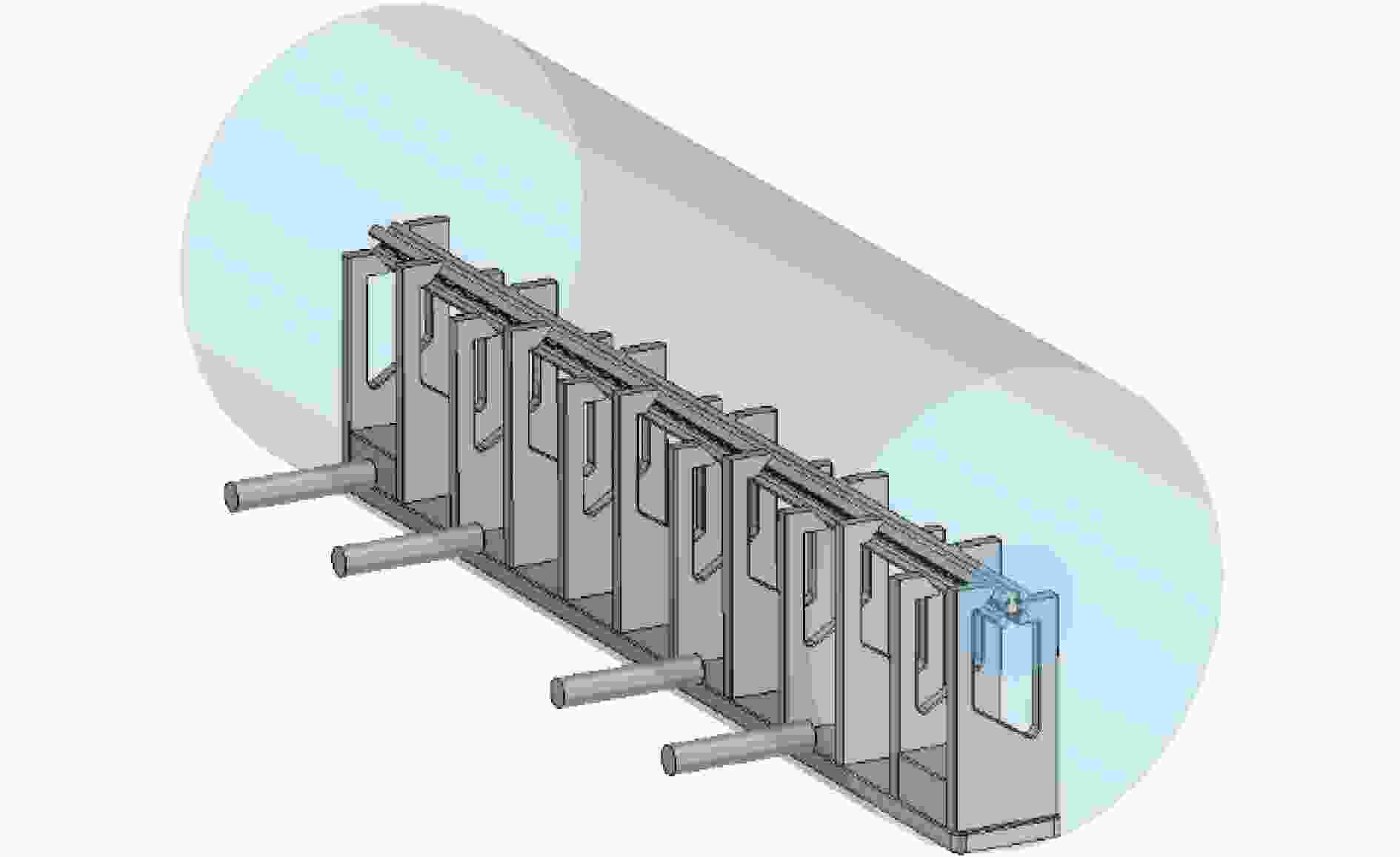
图 1 (在线彩图)SSC-LINAC RFQ腔体调谐杆示意图
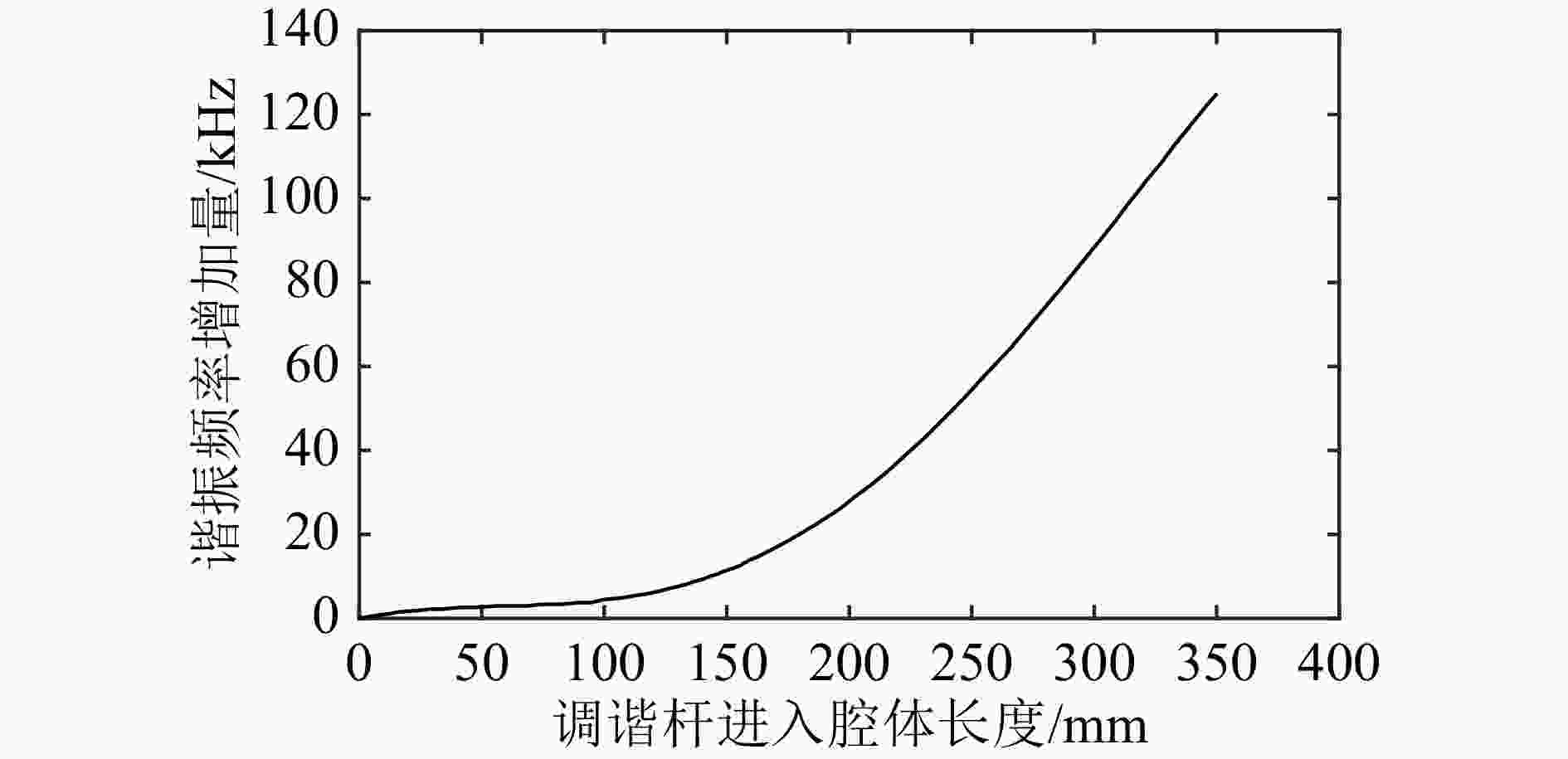
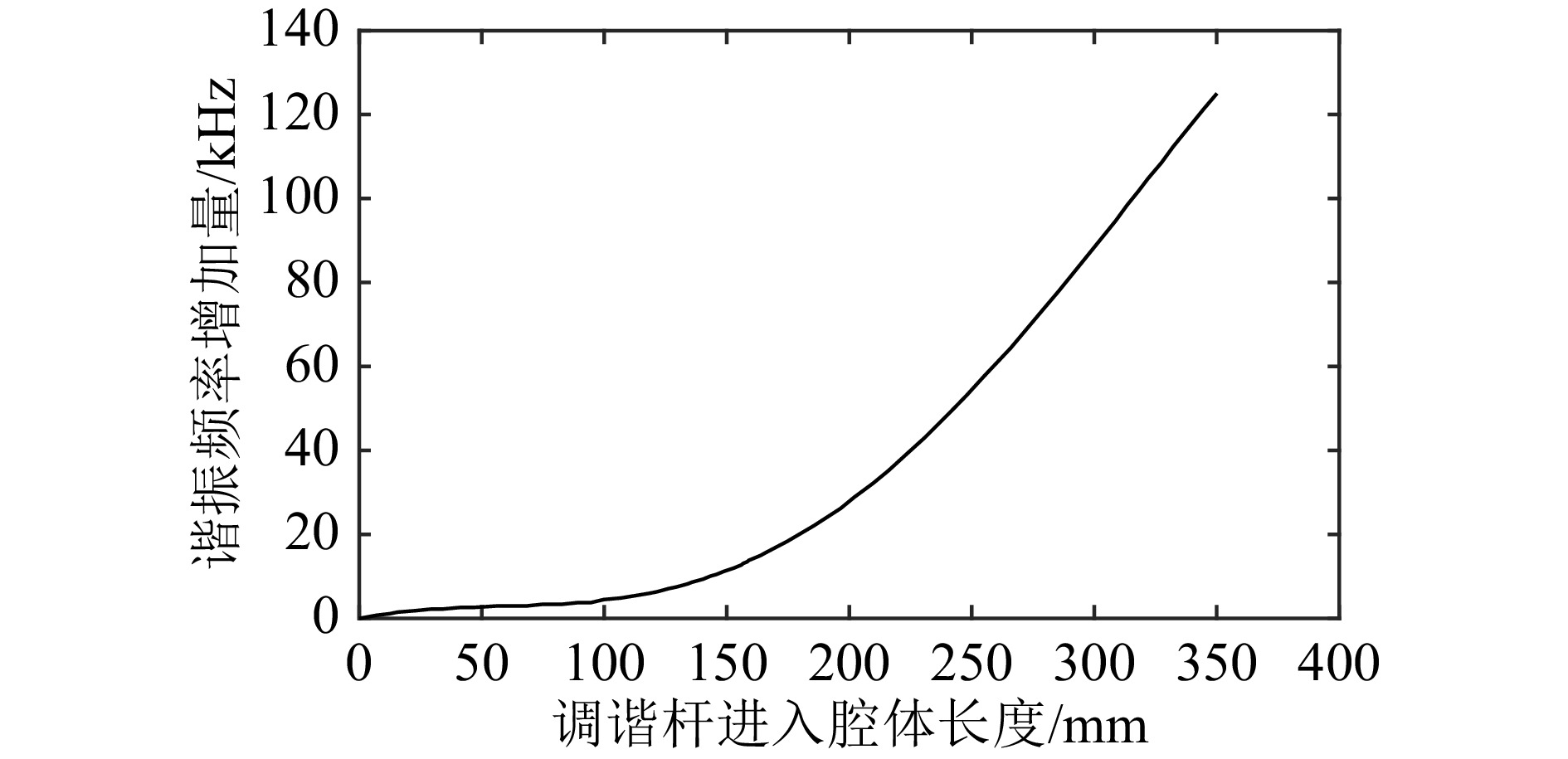
图 2 SSC-LINAC RFQ调谐杆进入腔体长度与腔体谐振频率增加量关系
四根调谐杆同步移动,移动范围为0~350 mm。移动调谐杆可以使得腔体谐振频率发生改变,由图2可见,最大改变量为125 kHz。通过调整调谐杆位置,可以使腔体处于谐振状态。
高频谐振腔失谐会导致高频电压降低和功率源系统的损坏[7]。为了保证腔体时刻处于调谐状态需要为腔体设计自动调谐系统[8]。调谐系统的作用是令腔体在选定频率上谐振,可以使腔体与功率源阻抗匹配,保证功率源向腔体馈入功率的效率[9]。高频谐振腔的调谐方法主要分为基于相位差与基于反射信号的调谐方法[10]。基于相位差的调谐方法缺点为启动时间较长,需要经常性的人为干预且准确性易受环境温度影响。结合Lyapunov稳定性理论[11],对滑模极值搜索算法进行改进。将改进后的算法应用在基于反射信号的调谐系统设计中,可以减小腔体调谐过程受环境温度变化的影响程度,提高调谐过程准确性,缩短启动时间,实现腔体功率的自动加载且满足调谐过程的频率稳定度[12]要求。
-
Korovin等[13]于1974年提出了一种基于滑模控制的非线性算法,即滑模极值搜索算法的雏形。滑模极值搜索算法的特点是收敛速度可以预先设置、鲁棒性强[14]。滑模极值搜索算法的收敛过程分为三个阶段[15]。系统由初始状态收敛于滑模面的过程为到达段,系统沿滑模面运动收敛于极值点的过程为滑动段,系统脱离滑模面稳定在极值点附近的过程为稳态段。
经典控制理论中用来判断系统稳定性的判据不适用于非线性系统。Lyapunov稳定性理论不仅适用于线性系统,而且适用于非线性系统。利用Lyapunov稳定性理论,结合SSC-LINAC RFQ高频系统特点对传统滑模极值搜索算法[16]的参考信号g(t)和控制增益ku进行改进,可以提高调谐系统的调谐精度和算法收敛速度。传统滑模极值搜索算法中,有
$$ \left\{ \begin{split}& \frac{{{{\rm{d}}}u}}{{\rm d}{t}} = {k_{{{u}}}}{\rm{\rm{sgn}}} \left[\sin \left(\frac{{\pi \sigma }}{{{\bf{\varepsilon }}}}\right)\right] \\ & \dot {g(t)} = - \rho \end{split} \right.{\text{ 。}} $$ (1) 改进前的控制参数u一阶导数的绝对值即为控制增益ku,算法收敛速度由参考信号的导数
$ |\dot {g(t)} | $ 决定。改进后的滑模极值搜索算法示意图如图3所示。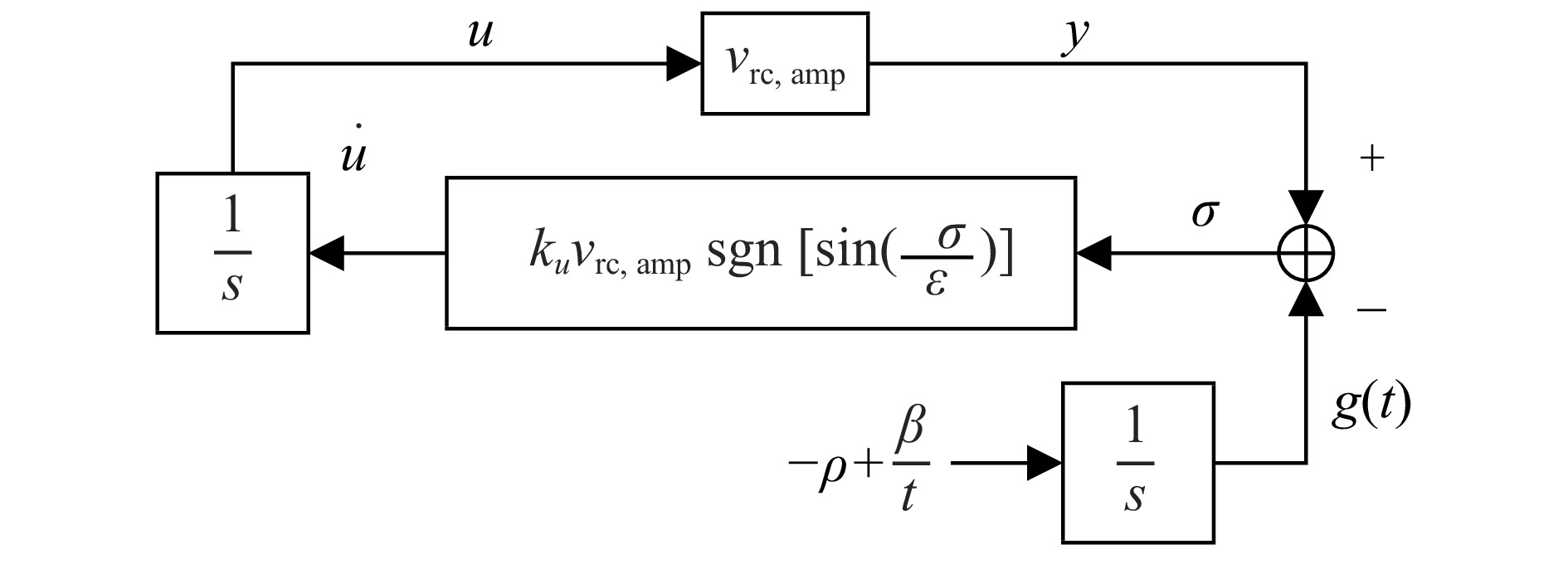
图 3 滑模极值搜索算法示意图
其中:参数ku、ε、ρ、β均为大于零的控制器参数;vrc, amp为腔体反射电压信号幅度;y为系统代价函数;σ为系统的切换函数;控制参数u反映了调谐杆的位移。ε的值必须保证系统移动到可控范围外之前改变符号函数的取值。
改进后的算法中,控制参数u的一阶导数满足
$$ \begin{split}\dot {u} =& {k_{{u}}}{v_{{{\rm{rc,\,amp}}}}}{\rm{sgn}} \left[\sin \left(\frac{{\pi \sigma }}{\varepsilon }\right)\right] \\=& {k_{{u}}}{v_{{{\rm{rc,\, amp}}}}}{\rm{sgn}} \left[2\sin \left(\frac{{{{\pi}}\sigma }}{{{{{2}}}\varepsilon }}\right)\cos \left(\frac{{{{\pi}}\sigma }}{{{{{2}}}\varepsilon }}\right)\right]{\text{ 。}}\end{split} $$ (2) 结合Lyapunov稳定性理论,构造Lyapunov函数如下:
$$ \left\{ \begin{array}{l} {V_1} = \dfrac{1}{2}{\sin ^2}\left( {\dfrac{{{{\pi}}\sigma }}{{2\varepsilon }}} \right) \\ {V_2} = \dfrac{1}{2}{\cos ^2}\left( {\dfrac{{{{\pi}}\sigma }}{{2\varepsilon }}} \right) \\ \end{array} \right. {\text{。}} $$ (3) 根据Lyapunov稳定性理论,对两式求导并令其小于零。此时,有V1、V2趋于常数。即σ=y–g(t)趋于常数。则有y的一阶导数等于–ρ+β/t。则y以–ρ+β/t的速度收敛于极小值,解得
$$ \big|\frac{{{{\rm{d}}}{v_{{{\rm{rc,\,amp}}}}}}}{{{{\rm{d}}}u}}\big| > \frac{{|\dot {g(t)} |}}{{{k_{u}}}} {\text 。} $$ (4) 由式(4)可见若要使系统能够稳定于滑模面,需满足
$ |\dot {g(t)} | $ 较小,ku较大。而系统位于滑动段时,代价函数以固定斜率$ \dot {g(t)} $ 向极值处收敛,此时要求$ |\dot {g(t)} | $ 较大。同时,过大的ku值会导致系统在稳态段振荡剧烈。所以ku应随时间减小。$ |\dot {g(t)} | $ 应随时间增大。结合高频腔调谐过程中,腔体反射电压信号幅度随时间的增加而减小。不同于传统滑模极值搜索算法,改设$$ \left\{ \begin{array}{l} \dfrac{{{{\rm{d}}}u}}{{{{\rm{d}}}t}} = {k_{u}}{v_{{{\rm{rc,\, amp}}}}}{\rm{sgn}} \left[\sin \left(\dfrac{{\pi \sigma }}{\varepsilon }\right)\right] \\ \dot {g(t)} = - \rho + \dfrac{\beta }{t} \\ \end{array} \right.{\text{ 。}} $$ (5) 应用改进后的滑模极值搜索算法进行基于反射信号的SSC-LINAC RFQ腔体频率稳定系统的软件仿真,还应求得系统的代价函数,即腔体反射电压信号幅度关于时间和调谐杆位置的函数。在此基础上结合滑模极值搜索算法,驱动调谐杆移动至使得腔体反射电压信号幅度最小的位置。
高频谐振腔等效电路模型为一个并联型RLC电路。结合基尔霍夫电流定律,求解微分方程,由于高频谐振腔谐振频率的变化速率相对输入信号的频率可忽略不计,可忽略暂态部分,只考虑稳态部分[17],得到腔体信号的稳态解如式(6)所示[18]:
$$\begin{split} \mathop {\lim }\limits_{t \to + \infty } x(t) =& \mathop {\lim }\limits_{t \to \infty } ({C_{{{1}}}}{{{\rm{e}}}^{\frac{{ - \gamma + \sqrt {{\gamma ^2} - 4(\varOmega _0^2 + k_u)} }}{2}t}} +\\& {C_{{{2}}}}{{{\rm{e}}}^{\frac{{ - \gamma - \sqrt {{\gamma ^2} - 4(\varOmega _0^2 + k_u)} }}{2}t}} + {Q_m}) = {Q_m} {\text{,}}\end{split} $$ (6) 其中:x为腔体电压信号;γ为阻尼系数;Ω0为腔体谐振频率;k为参数;C1、C2为系数;Qm是原非齐次线性微分方程的一个非齐次特解,指数函数项为原微分方程的齐次通解。
结合式(6),由vr = x–vin,可以得到高频谐振腔反射信号的函数表达式。其中,vr为腔体反射电压信号,vin为腔体入射信号。解得当输入信号为连续信号时,高频谐振腔反射信号关于u和时间的函数后,由辅助角公式,可以得到腔体反射电压信号幅度为
$$ {v_{{{\rm{rc,\, amp}}}}} = {V_{{{\rm{fc}}}}}\sqrt {\frac{{\dfrac{{2\Omega _{{{\rm{ic}}}}^{{{2}}}}}{{{Z_0}C}}\left(\dfrac{2}{{{Z_0}C}} - 2\gamma \right)}}{{\Omega _{{{\rm{ic}}}}^2{\gamma ^2} + {{(\Omega _0^2 + k_u - \Omega _{{{\rm{ic}}}}^2)}^2}}} + 1} {\text{,}} $$ (7) 其中:Vfc为输入连续信号的幅度;Ωic为输入连续信号的频率;Z0为腔体等效电路输入阻抗;C为腔体等效电路电容值。由式(7)可见,调谐目标为寻找控制参数u,使得
$\varOmega _0^2 + k_u - \varOmega _{{{\rm{ic}}}}^{{{2}}}$ 为零。此时有腔体反射电压信号幅度vrc, amp=0。结合式(7),进行基于滑模极值搜索算法的SSC-LINAC RFQ腔体频率稳定系统的软件仿真。 -
在MATLAB 2018b软件中进行仿真,利用滑模极值搜索算法改变控制参数u,记录腔体反射电压信号幅度和控制参数随时间的变化。设定仿真参数如表2所列,结合式(7),进行当输入为连续信号时,基于滑模极值搜索算法的仿真。
表 2 仿真参数设置
参数 数值 Ωic/MHz 53.667 Ω0/MHz 53.55 Z0C 1.418 4×10-4 γ(1/RC + 1/Z0C) 14 100 k 1×1012 Vf/kV 70 u/(kHz)2 495 ε 2 ρ 10 g(0) 0 ku 0.000 01 设腔体初始谐振频率为53.55 MHz。进行仿真,得到仿真结果如图4所示。
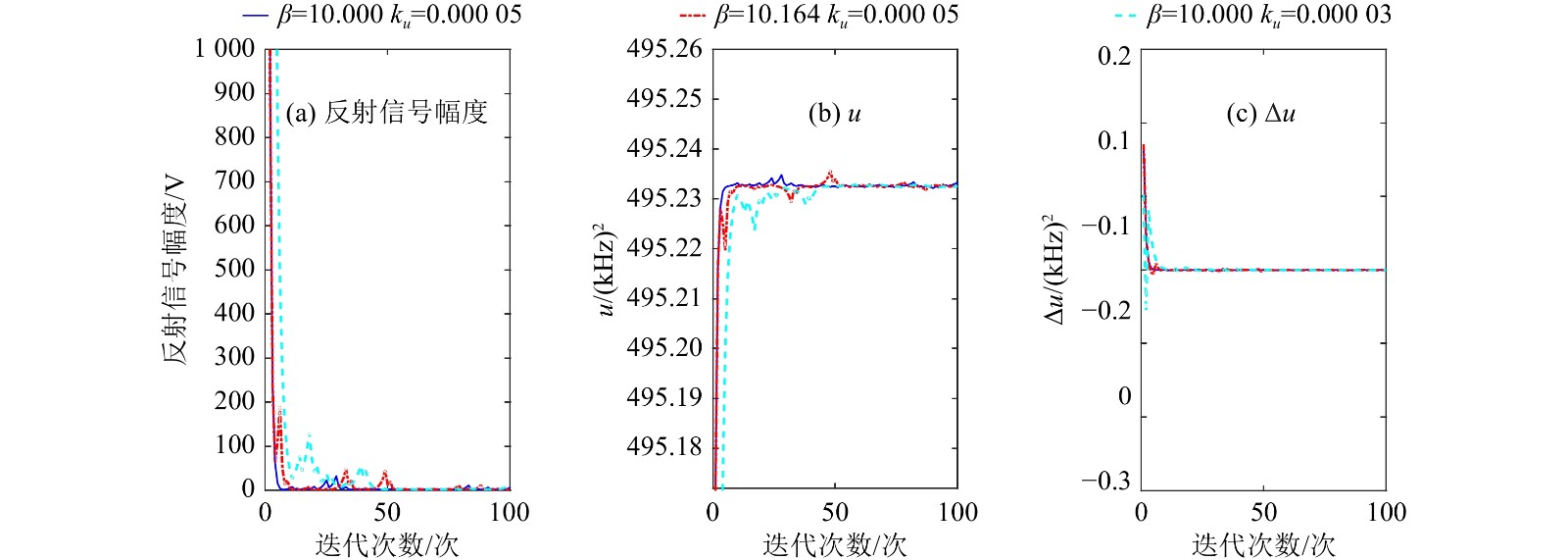
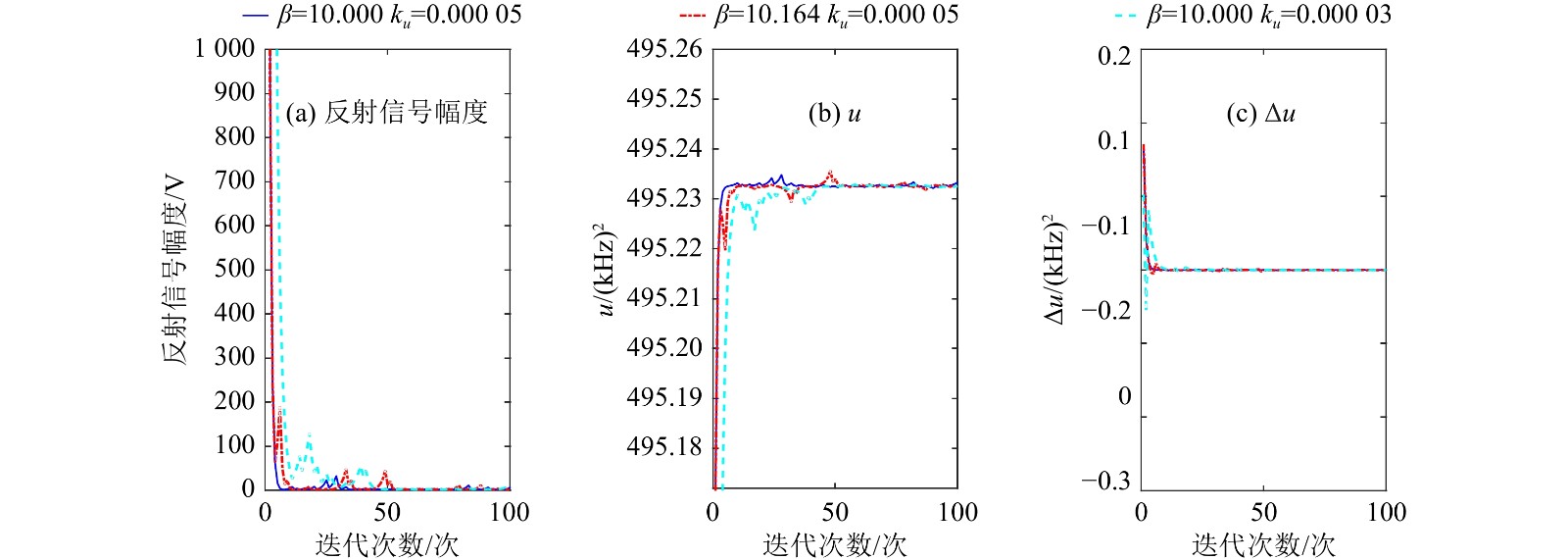
图 4 (在线彩图)基于滑模极值搜索算法的仿真结果
由仿真结果可见,随着迭代次数增加,腔体反射电压信号幅度趋于极小值。控制参数u的变化量收敛于极小值,代表调谐杆趋于目标位置。Δu趋于极小值,代表调谐杆速率趋于零。三种情况的频率稳定度仿真结果如图5所示。
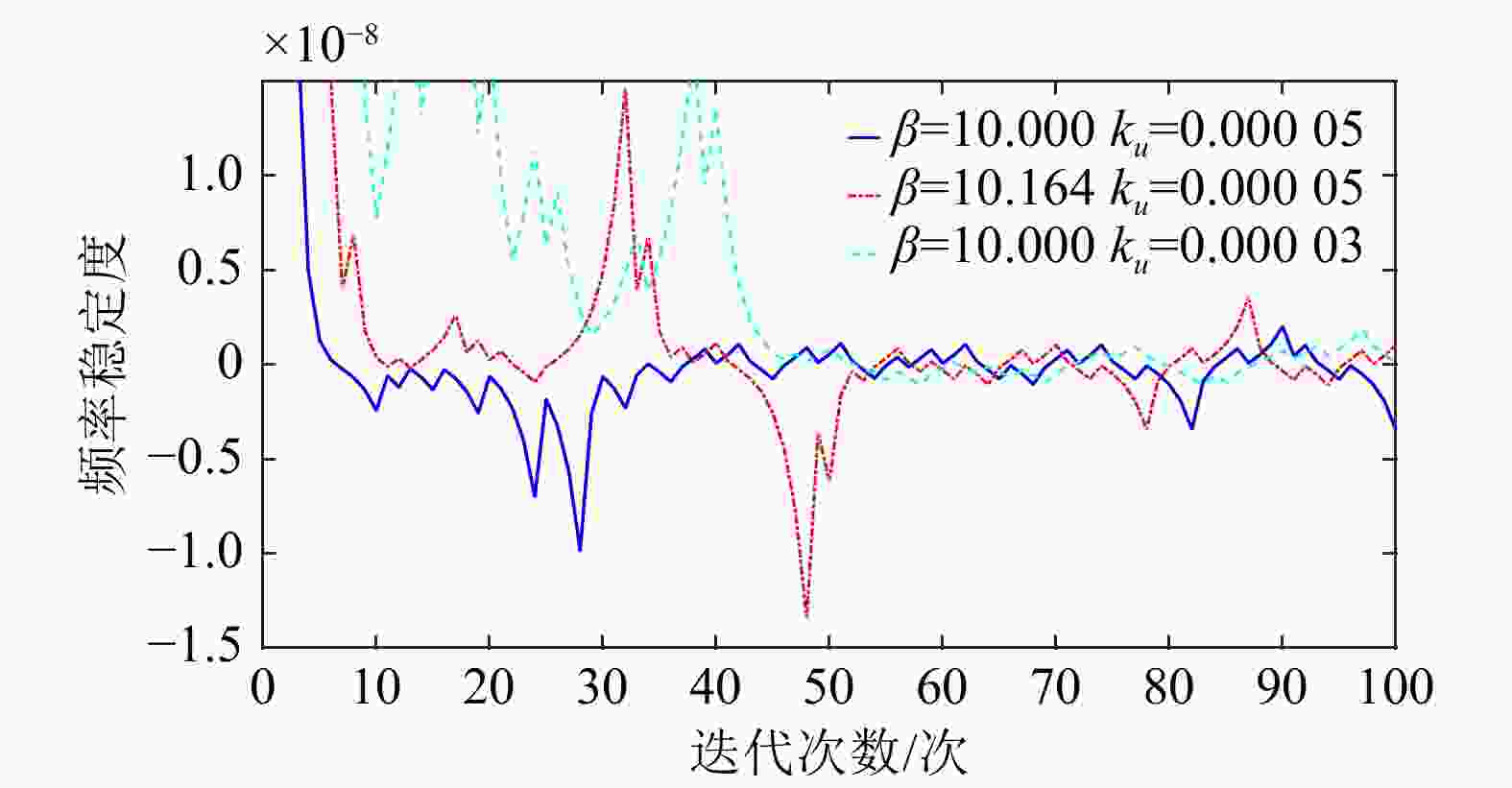
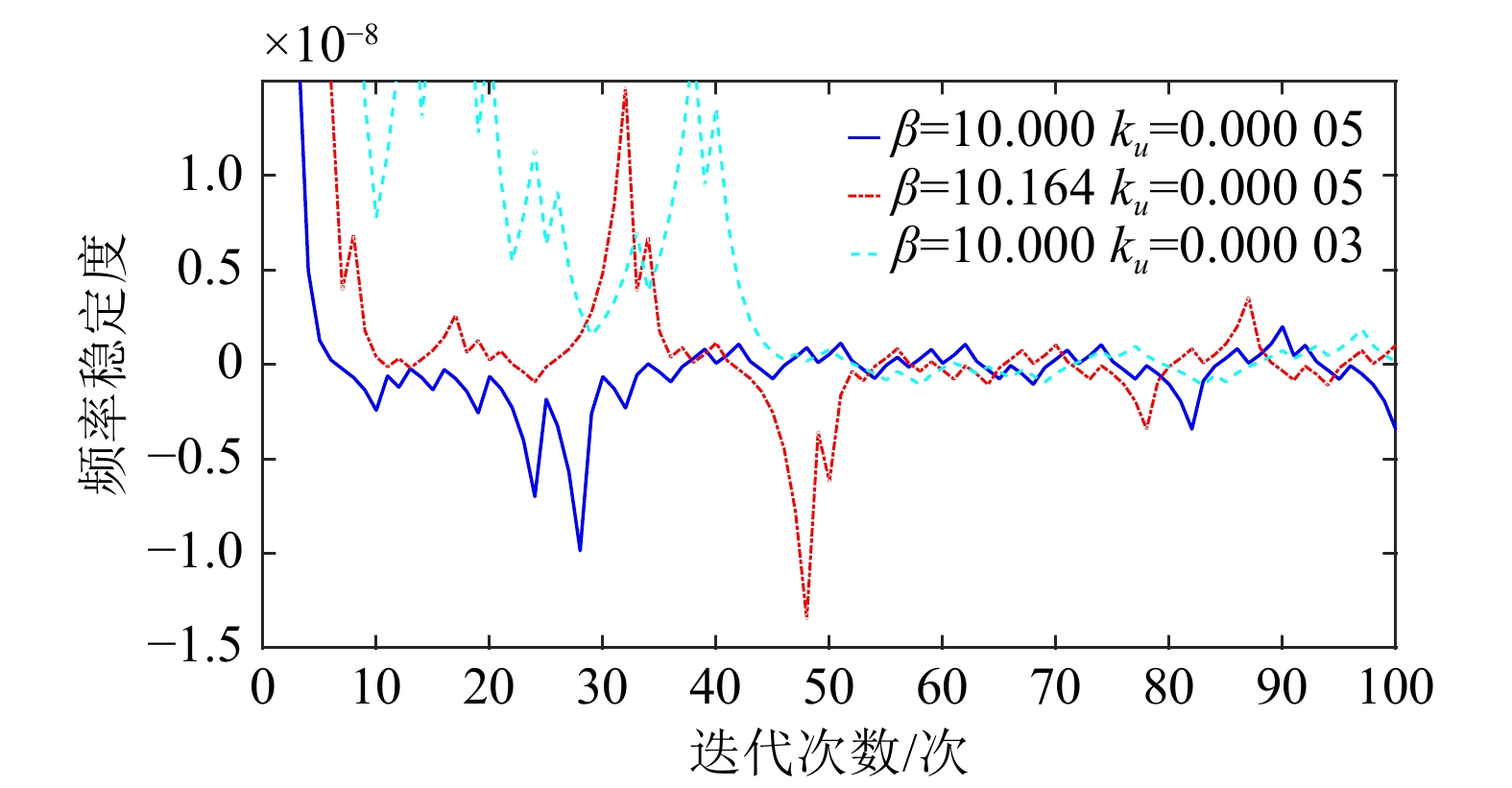
图 5 (在线彩图)频率稳定度仿真结果
腔体反射电压信号幅度在算法滑动段的收敛速度由
$ |\dot {g(t)} | $ 决定,增大β会导致$ |\dot {g(t)} | $ 减小。由图4和图5可见,增大β会降低腔体反射电压信号幅度的收敛速度。结合图5,计算在迭代次数超过60次后三种情况的频率稳定度,当β=10,ku=0.000 05时,频率稳定度保持在3.435 7×10–9以内。当β=10.164,ku=0.000 05时,频率稳定度保持在3.559 4×10–9以内。当β=10,ku=0.000 03时,频率稳定度保持在1.879 9×10–9以内。可见降低ku会导致收敛速度变慢,但调谐精度明显提高。在不触发高频发射机保护机制的前提下,选择较小的β和较小的ku可以使得收敛过程较快且调谐精度较高。 -
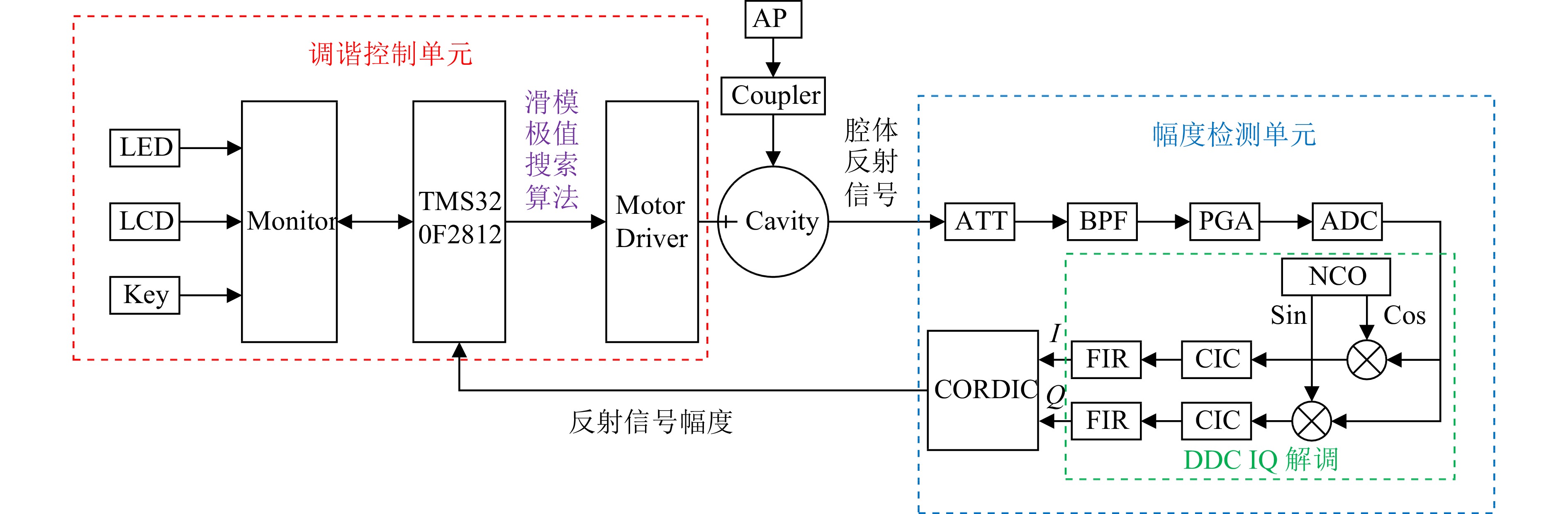
对SSC-LINAC RFQ腔体反射电压信号采样,令腔体反射电压信号通过幅度检测单元(Amplitude Detection Unit)的衰减器(ATT)、带通滤波器(BPF)和可编程增益放大器(PGA)后,由FPGA芯片通过模拟数字转换(ADC)芯片进行采集。调节PGA的放大值使高速ADC工作在最佳采样信号幅度。结合数字下变频(DDC)正交解调和坐标旋转数字计算(CORDIC)得到腔体反射电压信号的幅度:数字控制振荡器(NCO)产生两路正交序列,和输入的腔体反射电压信号相乘后通过低通滤波器变换为同相(I路)和正交(Q路)两路信号。利用这两路信号,通过向量模式的CORDIC算法,可以得到腔体反射电压信号的相位值和幅度值[19]。调谐控制单元(Tuning Control Unit)的DSP芯片TMS320F2812接收腔体反射电压信号的幅度值后,应用滑模极值搜索算法改变电机的运行速率和运行方向。
基于腔体反射电压信号的SSC-LINAC RFQ频率稳定系统整体结构如图6所示。
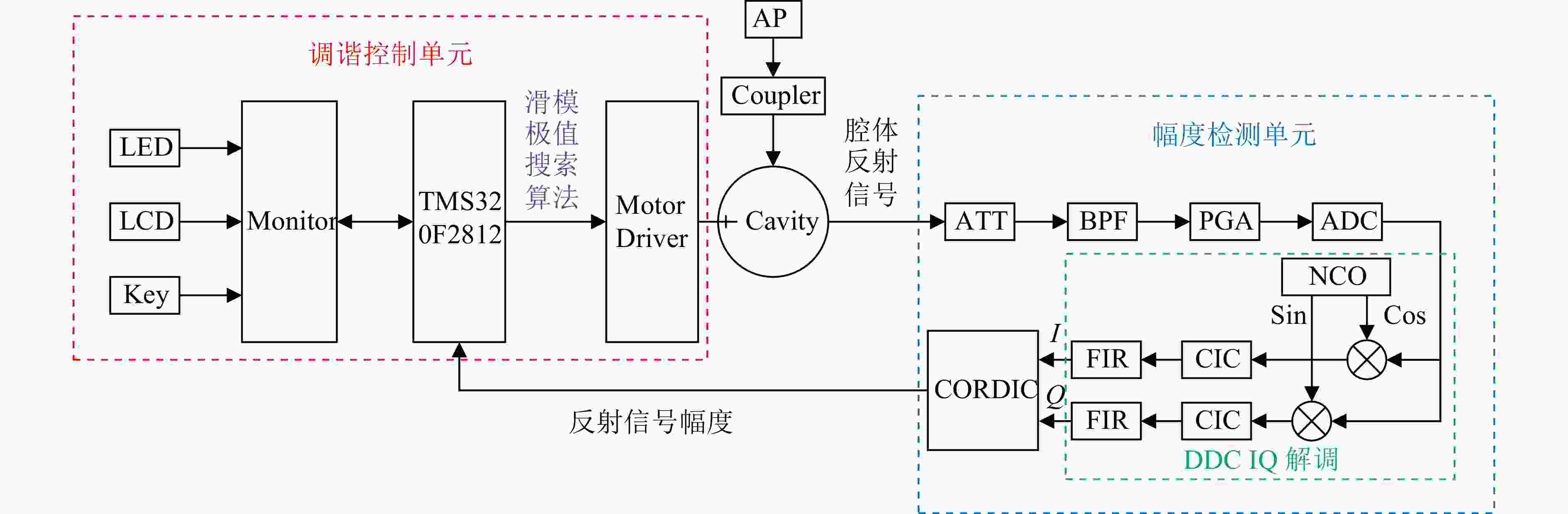
图 6 (在线彩图)基于腔体反射信号的频率稳定系统原理
-
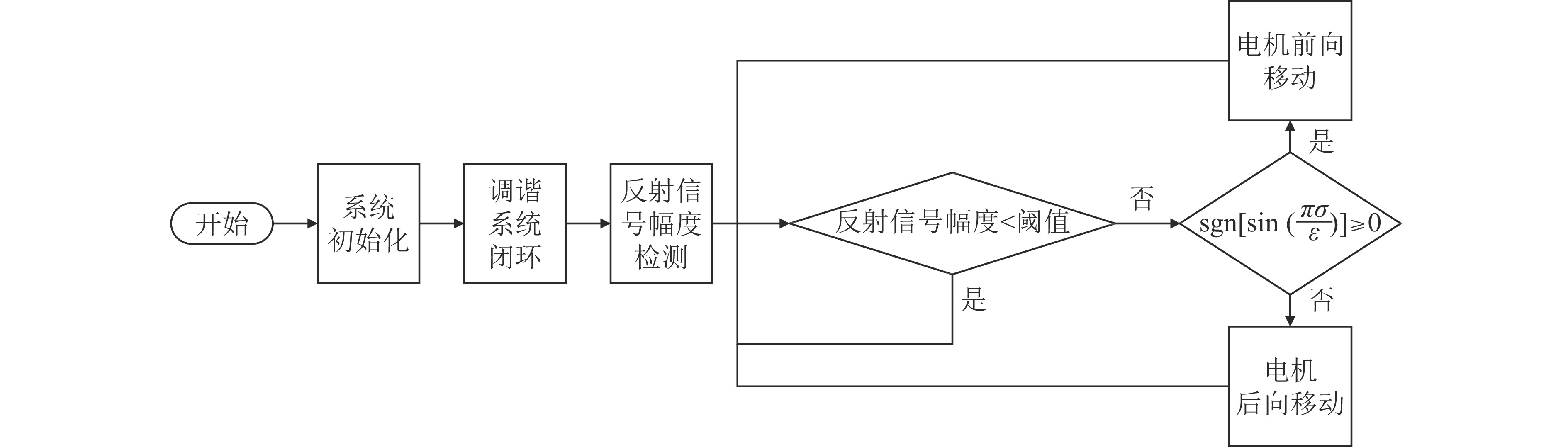
设计基于滑模极值搜索算法的程序流程图如图7所示。
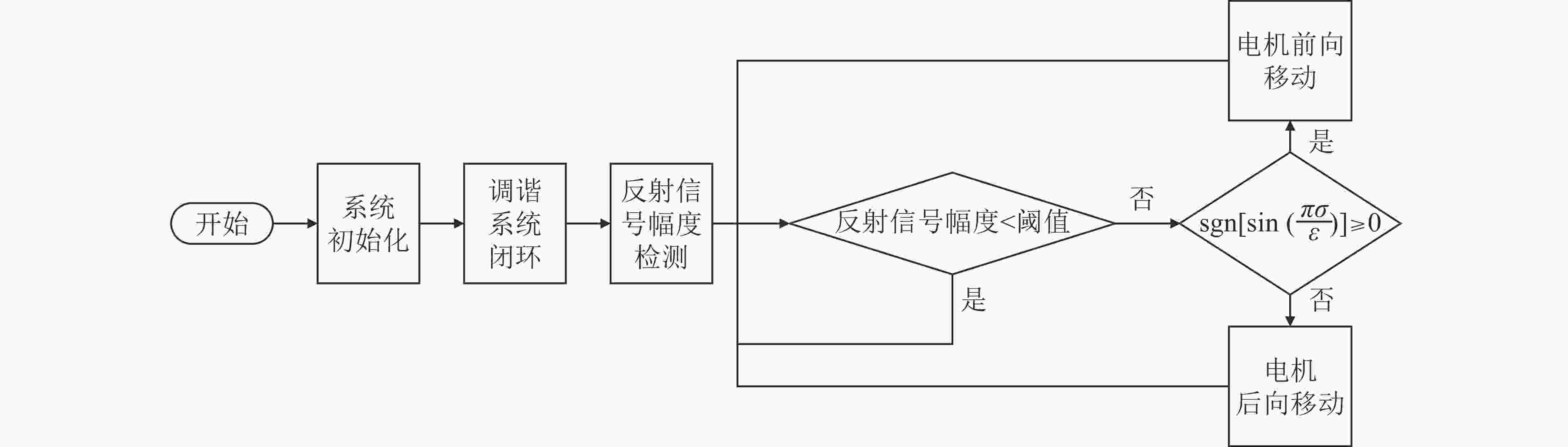
图 7 滑模极值搜索算法程序流程
系统闭环后检测腔体反射电压信号幅度是否大于给定阈值。设定当腔体反射电压信号幅度大于给定阈值时,进行基于滑模极值搜索算法的频率调谐过程,电机移动速度为kuvrc, amp,即移动速度同腔体反射电压信号幅度成正比。算法输出值为电机速率与方向,通过调整输出值改变腔体谐振频率,使得腔体反射电压信号幅度小于阈值。在SSC-LINAC RFQ腔体功率馈入过程中,不断循环这一过程,使得在腔体馈入功率增加时,腔体反射电压信号幅度始终保持在极小值。腔体调谐器设有限位开关用来避免调谐杆运动至极限位置。
-
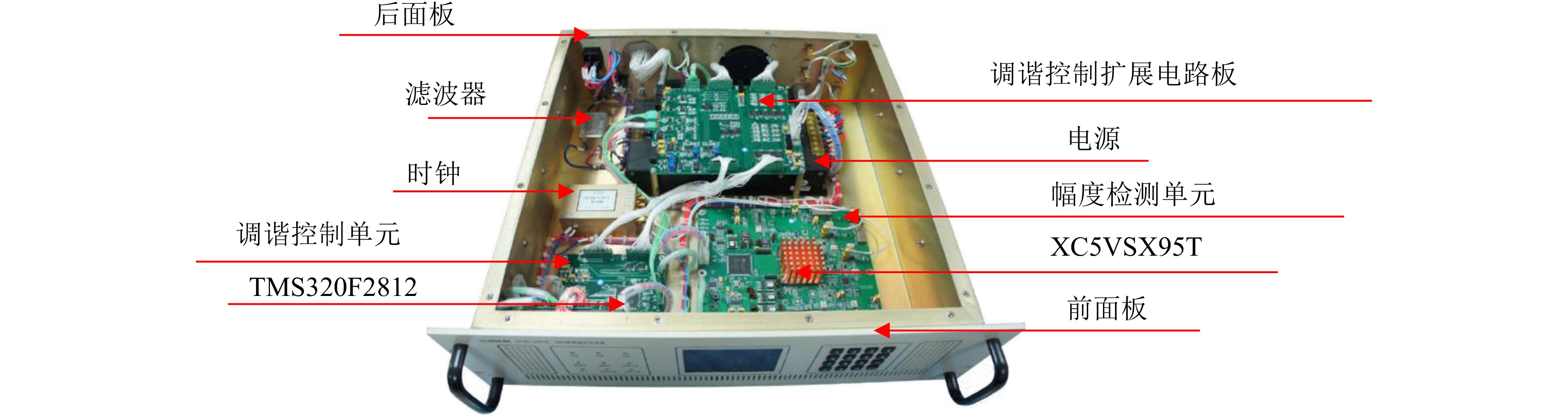
实际硬件测试平台如图8所示。
幅度检测单元由XC5VSX95T、BPF、PGA、ADC等组成。通过ADC采集SSC-LINAC RFQ腔体反射电压信号,通过DDC IQ解调和向量模式的CORDIC算法得到反射电压信号幅度,并将反射电压信号幅度传输给调谐控制单元。
调谐控制单元的DSP芯片TMS320F2812接收幅度检测单元传输的腔体反射电压信号幅度,并将其作为滑模极值搜索算法的代价函数,进行算法实现。DSP芯片输出的脉冲信号与方向信号通过连接线与电机驱动器连接。通过改变脉冲信号的脉冲宽度,可以改变调谐电机运行速率。通过改变方向信号电平的高低改变调谐电机运行方向。方向信号为高电平时,电机后向运行;方向信号为低电平时,电机前向运行。
由图8可见,Monitor模块由LED模块、LCD模块和Key模块组成,用来查看频率稳定系统的运行状态。上方扩展电路板用作电气隔离,用来保护硬件平台。
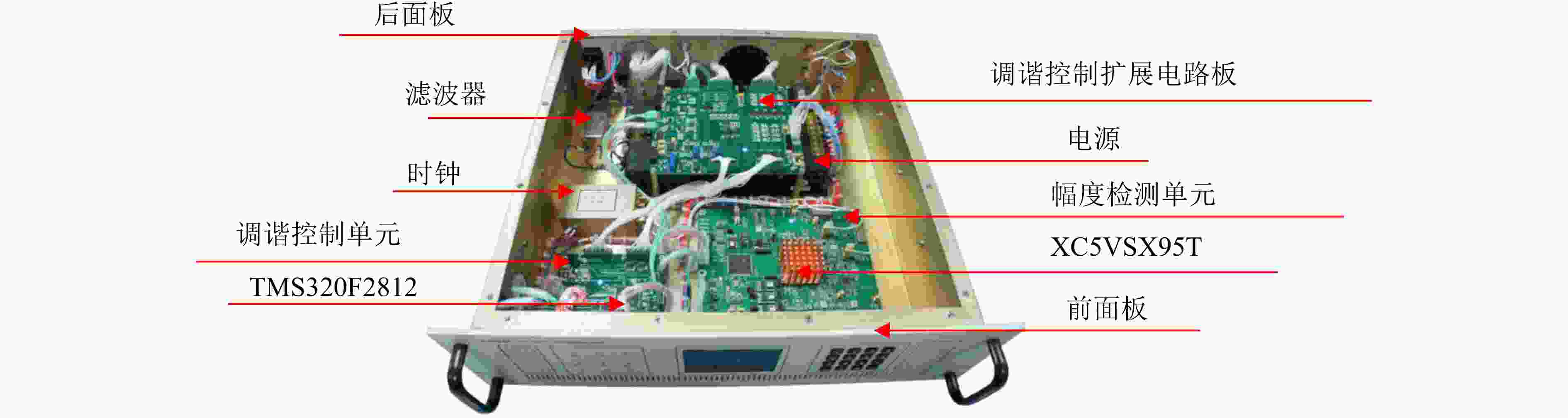
图 8 (在线彩图)硬件测试平台示意图
-
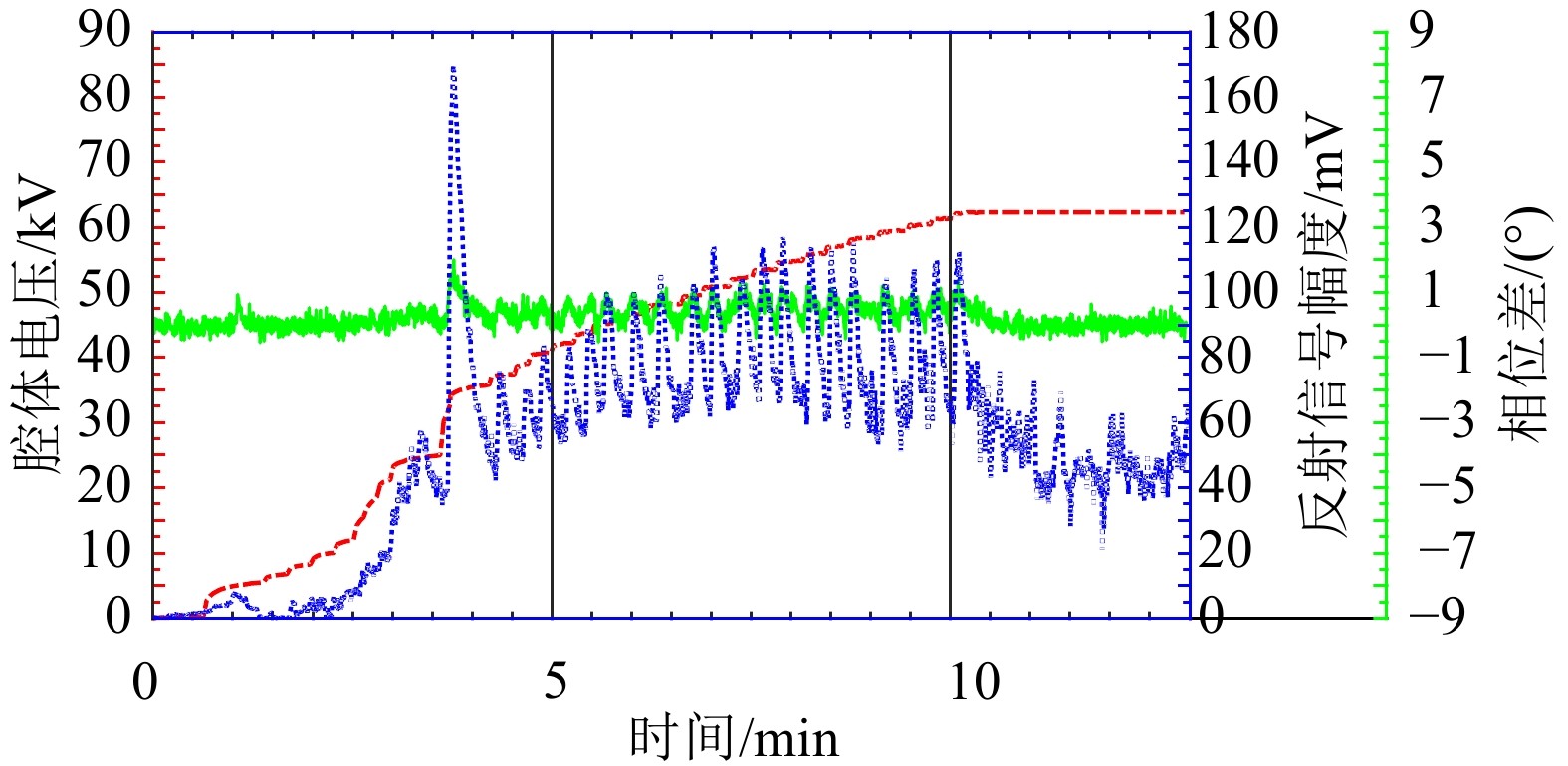
首先测试SSC-LINAC RFQ之前的基于相位差的频率调谐系统,启动功率馈入过程,记录SSC-LINAC RFQ腔体电压、腔体反射信号幅度和相位差随时间的变化,得到结果如图9所示。
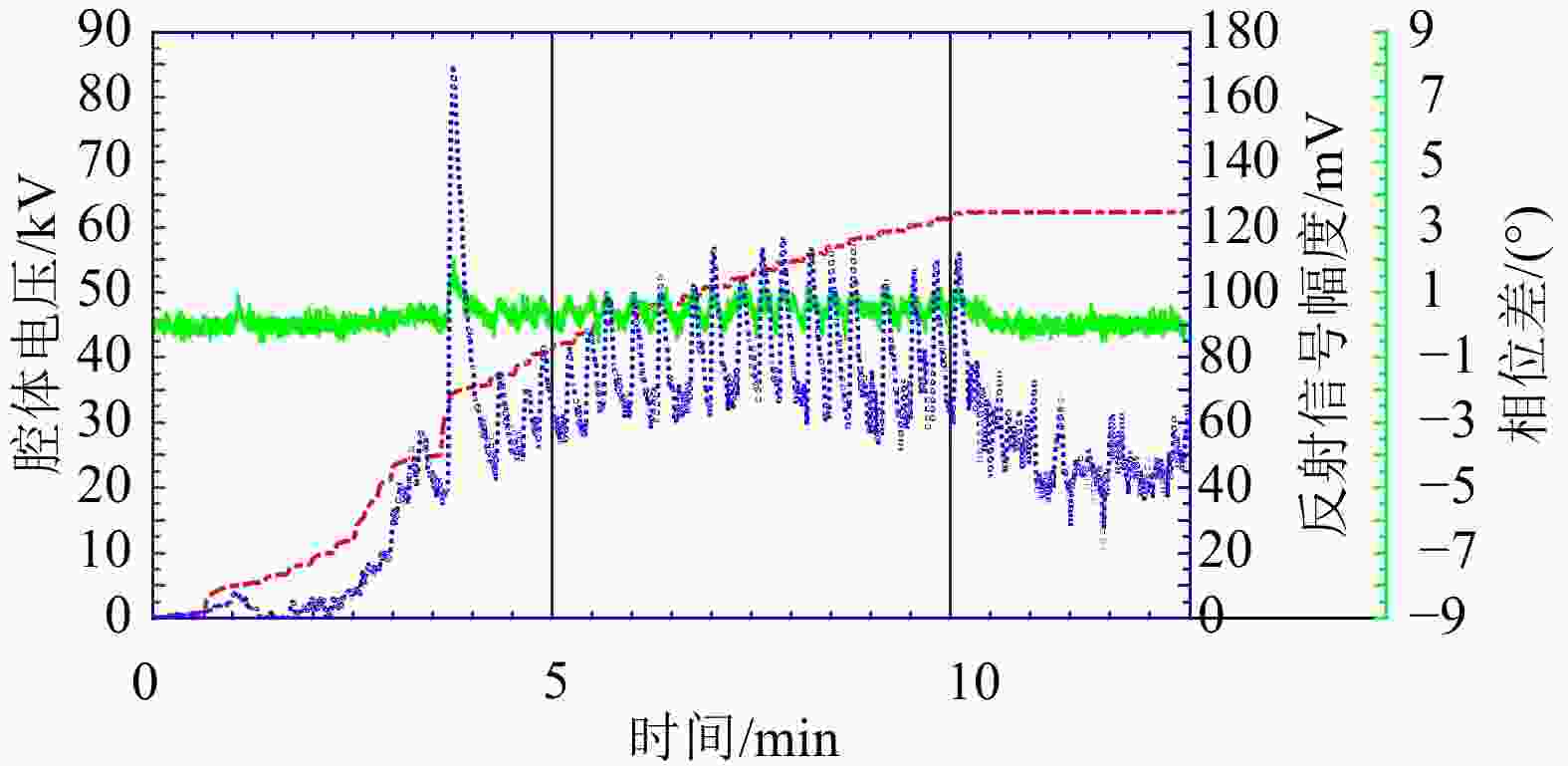
图 9 (在线彩图)基于相位差调谐方法的频率稳定系统闭环测试结果
基于相位差方法的频率稳定系统,在频率稳定系统闭环前,需参考腔体反射信号手动寻找腔体调谐点位置,然后将频率稳定系统闭环。如图9所示,1 min 33 s前略微增大入射功率,相位差及反射信号幅度均发生改变。根据腔体反射信号进行手动调谐后,将频率稳定系统闭环。随着馈入功率的增大,引发腔体温度上升,高频系统的工作状态随之发生变化,腔体调谐点位置也发生改变。因此在功率馈入过程中,需对腔体调谐点位置进行手动校正。导致系统加载功率速度慢,约需11 min。
启动本文设计的基于反射信号的腔体自动调谐系统,该系统会为腔体自动加载功率。记录腔体电压和经过衰减后的腔体反射信号幅度随时间的变化,结果如图10所示。

图 10 (在线彩图)SSC-LINAC RFQ腔体电压和反射信号幅度闭环测试结果
由表1可知,SSC-LINAC RFQ的设计电压为70 kV。但当腔体电压大于62 kV时,SSC-LINAC RFQ引出能量保持不变,腔体能够正常工作[20]。由图10的测试结果可知,随着功率不断馈入,腔体反射信号幅度随时间逐渐下降至极小值。总过程持续约5 min。实际过程耗时可以控制在5 min以内,但是由于要避免腔体耦合器快速升温导致耦合器陶瓷损坏,经测试选择功率的加载时长为5 min。
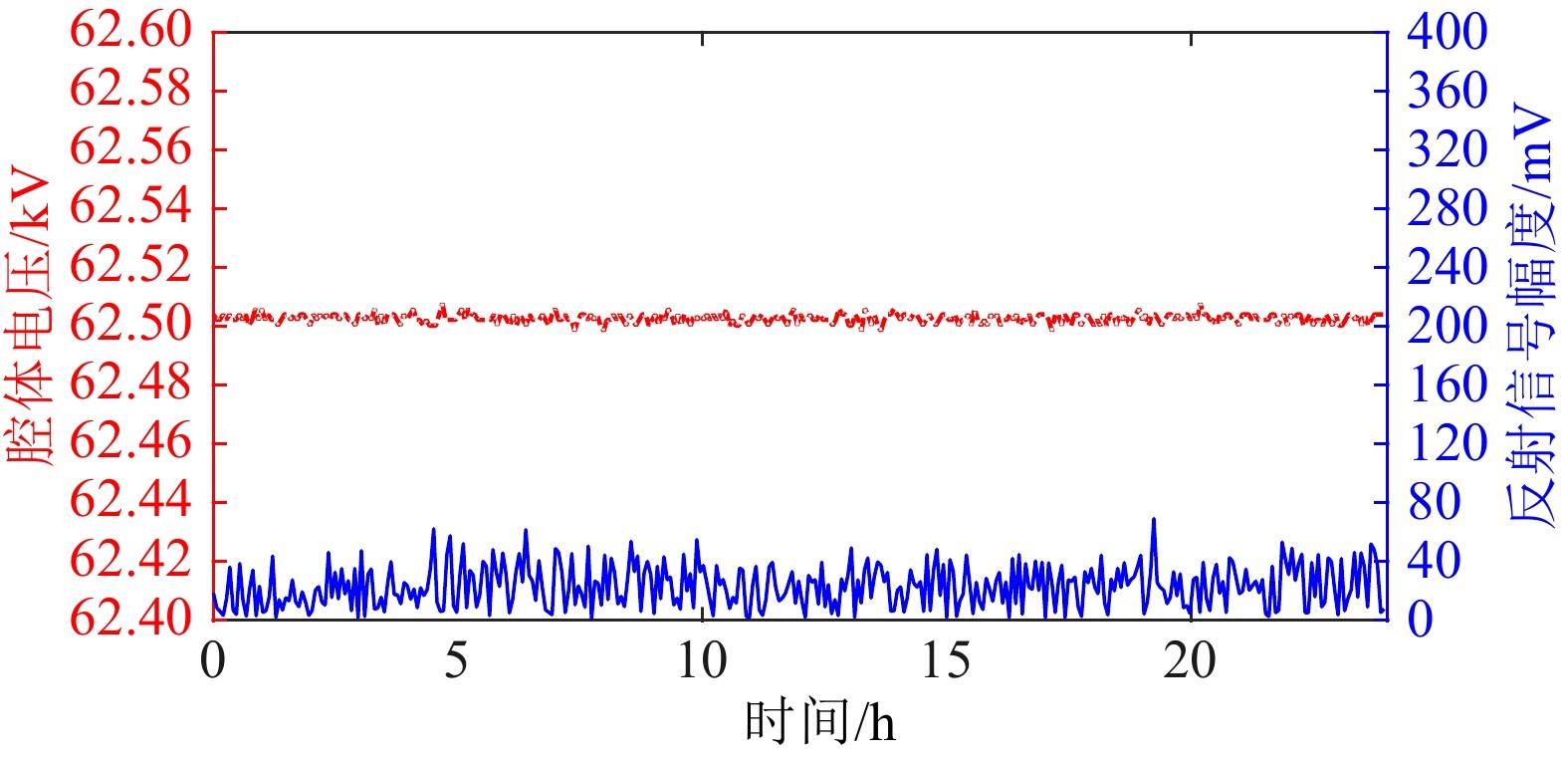
待腔体电压大于62 kV且腔体反射信号幅度趋于极小值后,将相位稳定系统和幅度稳定系统闭环,同时保持频率稳定系统处于闭环状态,对频率稳定系统进行24 h的闭环稳定性测试。得到结果如图11所示。

图 11 (在线彩图)基于反射信号的频率稳定系统闭环稳定性测试结果
24 h的频率稳定系统闭环稳定性测试结果显示,腔体电压能够保持在62 kV以上,反射信号幅度平均值小于40 mV。电机移动范围在0.65 mm以内,结合图2得到腔体谐振频率改变量小于53.47 Hz,频率稳定度保持在±5×10–6以内,满足设计指标要求。
相比之下,应用基于反射信号的频率稳定系统时,避免了人为干预过程,只需保证在功率馈入过程中反射信号幅度始终保持在极小值。这样就可以实现SSC-LINAC RFQ腔体功率的自动馈入。所以图9的功率馈入过程耗时大于图10。
对比图9和图10可见,所设计的基于反射信号的频率稳定系统的功率馈入过程耗时,小于基于相位差方法的频率稳定系统。且在幅度稳定系统和相位稳定系统闭环后,图10显示的反射信号幅度平均值小于图9,证明其调谐精度大于基于相位差方法的频率稳定系统。
Design and Testing of SSC-LINAC RFQ Tuning System Based on Extremum Seeking Algorithm with Sliding Mode
-
摘要: 将滑模极值搜索算法引入基于腔体反射信号的SSC-LINAC射频四极场加速器(Radio Frequency Quadrupole, RFQ)腔体频率稳定系统设计中,结合Lyapunov稳定性理论和SSC-LINAC RFQ高频系统的特点,对滑模极值搜索算法的控制增益和参考信号进行改进;通过求解微分方程,得到腔体反射信号关于时间和调谐杆位置的函数。通过软件仿真和设计硬件系统,对基于滑模极值搜索算法的调谐过程进行仿真与实际测试,结果显示,所设计的频率稳定系统能够在较短时间内实现SSC-LINAC RFQ腔体功率自动馈入过程且频率稳定度满足设计指标要求,通过了长时间稳定性试验。证明了将滑模极值搜索算法应用于高频谐振腔调谐工作的可行性。Abstract: Extremum seeking algorithm with sliding mode is presented for design of automatic tuning control system of SSC-LINAC RFQ(Radio Frequency Quadrupole) based on the cavity reflected signal. Combined with the Lyapunov stability theory and the characteristics of SSC-LINAC RFQ radio frequency system, the control gain and reference signal of the sliding mode algorithm are improved. By solving the differential equation, the functions of the cavity reflected signal with respect to time and the position of the tuning rod are obtained. Through software simulation and hardware system design, the tuning process based on extremum seeking algorithm with slidig mode is simulated and tested. The results show that the designed frequency stabilization system can realize the automatic power feeding process of SSC-LINAC RFQ cavity in a short time, and the frequency stability meets the design index requirements, and has passed the long-time stability test. The feasibility of applying the extremum seeking algorithm with sliding mode to the tuning of high frequency resonator is proved.
-
Key words:
- RF cavity /
- RFQ /
- extremum seeking with sliding mode /
- SSC-LINAC
-
表 1 SSC-LINAC RFQ腔体主要参数
参数 数值 工作频率/MHz 53.667 设计粒子 238U34+ 输入能量/(keV/u) 3.728 输出能量/(keV/u) 143 腔体电压/kV 70 传输效率/% 94.1 结构长度/cm 250.846 功率消耗/kW 30  下载: 导出CSV
下载: 导出CSV
表 2 仿真参数设置
参数 数值 Ωic/MHz 53.667 Ω0/MHz 53.55 Z0C 1.418 4×10-4 γ(1/RC + 1/Z0C) 14 100 k 1×1012 Vf/kV 70 u/(kHz)2 495 ε 2 ρ 10 g(0) 0 ku 0.000 01
下载: 导出CSV
-
[1] 张小虎. HIRFL重离子直线注入器的动力学设计与研究 [D]. 中国科学院研究生院(近代物理研究所), 2014. ZHANG Xiaohu. Beam Dynamics Design and Research of the Linac Injectors in HIRFL [D]. Lanzhou: Institute of Modern Physics, Chinese Academy of Sciences, 2014. (in chinese) [2] LIU G, LU Y R, HE Y, et al. Nucl Instr and Meth A, 2013, 701: 186. doi: 10.1016/j.nima.2012.11.017 [3] 王静, 黄建龙, 张小奇, 等. 原子核物理评论, 2016, 33(04): 437. doi: 10.11804/NuclPhysRev.33.04.437 WANG Jing, HUANG Jianlong, ZHANG Xiaoqi, et al. Nuclear Physics Review, 2016, 33(04): 437. (in Chinese) doi: 10.11804/NuclPhysRev.33.04.437 [4] YIN X, YUAN Y J, XIA J W, et al. Physical Review Special Topics - Accelerators and Beams, 2016, 19: 010402. doi: 10.1103/PhysRevAccelBeams.19.010402 [5] 李钟汕. 重离子射频四极场直线加速器的物理设计与实验研究 [D]. 兰州: 中国科学院近代物理研究所, 2017. LI Zhongshan. Theoretical Design and Experimental Studies of Heavy Ion Radiofrequency Quadrupole Linac [D]. Lanzhou: Institute of Modern Physics, Chinese Academy of Sciences, 2017. (in chinese) [6] ZHU K, LU Y R, YIN X J, et al. The Beam Commissioning of a CW High Charge State Heavy ion RFQ. Nucl Instr and Meth A, 2015, 794: 113. doi: 10.1016/j.nima.2015.05.012 [7] 任红文. 加速器高频自动频率调谐系统的设计与实现 [D]. 兰州: 兰州大学, 2010. REN Hongwen. Design and Implementation of The Accelerator Transmitter Tune System[D]. Lanzhou: Lanzhou University, 2010. (in chinese) [8] 丛岩, 许少凡, 李世龙, 等. 原子核物理评论, 2019, 36(01): 55. doi: 10.11804/NuclPhysRev.36.01.055 CONG Yan, XU Shaofan, LI Shilong, et al. Nuclear Physics Review, 2019, 36(01): 55. (in Chinese) doi: 10.11804/NuclPhysRev.36.01.055 [9] 马腾飞, 薛鹏, FONG K, 等. 原子核物理评论, 2018, 35(03): 294. doi: 10.11804/NuclPhysRev.35.03.294 MA Tengfei, XUE Peng, FONG K, et al. Nuclear Physics Review, 2018, 35(03): 294. (in Chinese) doi: 10.11804/NuclPhysRev.35.03.294 [10] SHAHRIARI Z, LEEWE R, MOALLEM M, et al. IEEE/ASME Transactions on Mechatronics, 2017, 23(1): 311. doi: 10.1109/TMECH.2017.2772183 [11] LEEWE R, SHAHRIARI Z, FONG K, et al. Nucl Instr and Meth A, 2018, 902: 70. doi: 10.1016/j.nima.2018.06.003R [12] 许哲, 石爱民, 王春晓, 等. 强激光与粒子束, 2005, 10(10): 139. doi: CNKI:SUN:QJGY.0.2005-10-029 XU Zhe, SHI Aimin, WANG Chunxiao, et al. High Power Laser and Particle Beams, 2005, 10(10): 139. (in Chinese) doi: CNKI:SUN:QJGY.0.2005-10-029 [13] KOROVIN S K, UTKIN V I. Automatica, 1974, 10(5): 525. doi: 10.1016/0005-1098(74)90053-3 [14] 左斌, 胡云安, 施建洪. 海军航空工程学院学报, 2006, 06: 611. doi: 10.3969/j.issn.1673-1522.2006.06.003 ZUO Bin, HU Yunan, SHI Jianhong. Journal of Naval Aeronautical Engineering Institute, 2006, 06: 611. (in Chinese) doi: 10.3969/j.issn.1673-1522.2006.06.003 [15] 孙正宜. 二阶滑模极值搜索控制一般化设计方法及应用研究 [D]. 哈尔滨: 哈尔滨工业大学, 2019. SUN Zhengyi. General Design Method and Application of Second-order Sliding Mode Extremum Seeking Control[D]. Harbin : Harbin Institute of Technology, 2019. (in chinese) [16] PAN Y, OZGÜNER Ü, ACARMAN T. International Journal of Control, 2003, 76(9-10): 968. doi: 10.1080/0020717031000099100 [17] LEEWE R, MOALLEM M, FONG K. Control of RF Cavity Resonance Frequency Using Reflected Power Measurements [C] // Conference of the IEEE Industrial Electronics Society. New York: IEEE, 2013. [18] LEEWE R, MOALLEM M, FONG K. System Modeling and Control of Resonance Frequency for an RF Cavity Using Reflected Power Measurements [C]//IEEE/ASME International Conference on Advanced Intelligent Mechatronics. New York: IEEE, 2014. [19] 王强, 应浩. 兵工自动化, 2020, 39(06): 45. WANG Qiang, YING Hao. Ordnance Industry Automation, 2020, 39(06): 45. (in Chinese) [20] 张小虎, 原有进, 夏佳文, 等. 原子核物理评论, 2015, 32(01): 50. doi: 10.11804/NuclPhysRev.32.01.050 ZHANG Xiaohu, YUAN Youjin, XIA Jiawen, et al. Nuclear Physics Review, 2015, 32(01): 50. (in Chinese) doi: 10.11804/NuclPhysRev.32.01.050 -

 点击查看大图
点击查看大图
图(11) / 表 (2)
计量
- 文章访问数: 928
- HTML全文浏览量: 209
- PDF下载量: 34
- 被引次数: 0















 甘公网安备 62010202000723号
甘公网安备 62010202000723号